Perangkap tikus rumah otomatis merupakan inovasi yang memanfaatkan teknologi sensor untuk meningkatkan efektivitas dan efisiensi dalam menangkap tikus di rumah. Perangkat ini dirancang sebagai modul keempat dalam Praktikum Up & Uc, dengan tujuan memberikan solusi yang lebih canggih dibandingkan perangkap tikus konvensional maupun perangkap yang hanya menggunakan sensor PIR. Penggunaan beberapa sensor dalam perangkap tikus otomatis ini diharapkan dapat meningkatkan tingkat keberhasilan penangkapan dan mengurangi intervensi manual.
Perangkap ini menggunakan beberapa jenis sensor yang bekerja secara sinergis. Sensor infrared obstacle digunakan untuk mendeteksi adanya objek di dalam perangkap, memastikan bahwa tikus sudah masuk ke dalam perangkap. Sensor PIR (Passive Infrared) mendeteksi keberadaan tikus melalui pergerakan dan suhu tubuhnya, memberikan sinyal awal saat tikus mendekati perangkap. Sensor berat yang terhubung dengan modul HX711 mampu mengidentifikasi berat tikus antara 70 hingga 300 gram, menegaskan keberadaan tikus di dalam perangkap. Sensor vibrasi jenis piezoelektromagnetik digunakan untuk mendeteksi getaran yang ditimbulkan oleh tikus yang mencoba melarikan diri atau mengamuk. Selain itu, sensor suara analog digunakan untuk mendeteksi suara yang dihasilkan oleh tikus, menambah lapisan deteksi tambahan yang meningkatkan akurasi sistem.
Perangkat ini memiliki beberapa output untuk mengoperasikan perangkap secara otomatis. LED hijau digunakan sebagai indikator visual bahwa tikus telah tertangkap. Motor berfungsi untuk membuka dan menutup pintu perangkap secara otomatis ketika tikus terdeteksi. Buzzer digunakan sebagai penanda suara bahwa tikus sudah tertangkap, memberikan notifikasi kepada pengguna.
Dibandingkan dengan perangkap tikus konvensional yang biasanya menggunakan umpan dan mekanisme pegas untuk menangkap tikus, perangkap otomatis ini menawarkan solusi yang lebih modern dan higienis. Perangkap konvensional sering kali memerlukan pemantauan terus-menerus dan intervensi manual, serta kurang efektif dalam mendeteksi dan menangkap tikus yang lebih cerdik. Sementara itu, perangkap tikus otomatis yang hanya menggunakan sensor PIR juga memiliki keterbatasan, terutama dalam mendeteksi tikus yang tidak banyak bergerak atau suhu tubuhnya tidak cukup terdeteksi. Kombinasi berbagai sensor dalam perangkap otomatis ini bertujuan untuk mengatasi kelemahan tersebut, meningkatkan akurasi dan efisiensi penangkapan tikus.
Dengan memanfaatkan teknologi sensor yang canggih, perangkap tikus rumah otomatis ini diharapkan dapat menjadi solusi yang lebih efektif dan efisien dalam mengatasi masalah tikus di rumah, memberikan kenyamanan dan kebersihan yang lebih baik bagi penggunanya.
A.Meningkatkan Efektivitas dan Efisiensi Penangkapan Tikus: Mengembangkan perangkap tikus yang lebih efektif dengan memanfaatkan kombinasi berbagai sensor (infrared obstacle, PIR, berat, vibrasi, dan suara) untuk mendeteksi dan menangkap tikus dengan lebih akurat dan cepat.
B.Mengurangi Keterlibatan Manual dan Meningkatkan Higienitas: Merancang sistem perangkap yang bekerja secara otomatis, mengurangi kebutuhan intervensi manual, dan meminimalkan kontak langsung dengan tikus, sehingga meningkatkan kebersihan dan keamanan bagi pengguna.
C.Memberikan Notifikasi yang Jelas dan Cepat: Menyediakan indikator visual (LED hijau) dan audio (buzzer) untuk memberi tahu pengguna segera setelah tikus tertangkap, memungkinkan pengguna untuk mengambil tindakan yang diperlukan dengan cepat.
D.Mengoptimalkan Penggunaan Teknologi Sensor: Mengevaluasi dan mengoptimalkan kinerja berbagai sensor dalam aplikasi nyata, memahami kelebihan dan kekurangannya, serta menawarkan solusi teknologi yang terintegrasi dan mudah digunakan untuk pengendalian tikus di rumah.
Multimeter adalah alat ukur elektronik yang digunakan untuk mengukur berbagai parameter listrik seperti tegangan (volt), arus (ampere), dan resistansi (ohm). Multimeter dapat berbentuk digital maupun analog. Berikut merupakan fungsi dari multimeter:
a.Mengukur Tegangan (Voltage): Multimeter dapat mengukur tegangan listrik dalam rangkaian, baik tegangan searah (DC) maupun tegangan bolak-balik (AC). Rentang pengukuran tegangan biasanya berkisar dari milivolt (mV) hingga ratusan volt (V).
b.Mengukur Arus (Current): Multimeter dapat mengukur aliran arus listrik dalam rangkaian. Multimeter digital dapat mengukur arus DC dan AC dengan rentang dari mikroampere (µA) hingga ampere (A). Untuk mengukur arus, multimeter harus disambungkan secara seri dengan rangkaian.
c.Mengukur Resistansi (Resistance): Multimeter dapat mengukur hambatan dalam komponen atau rangkaian. Satuan resistansi adalah ohm (Ω), dengan rentang pengukuran dari ohm hingga megaohm (MΩ).
d.Pengukuran Tambahan: Beberapa multimeter dilengkapi dengan fitur tambahan seperti pengukuran kapasitansi (farad), frekuensi (hertz), suhu (derajat Celsius atau Fahrenheit), serta tes dioda dan kontinuitas.
Multimeter terbagi menjadi dua jenis utama, yaitu analog dan digital. Multimeter analog menggunakan jarum yang bergerak pada skala untuk menunjukkan nilai pengukuran. Kelebihannya termasuk kemampuan menunjukkan perubahan cepat dalam sinyal dan tidak memerlukan baterai untuk mengukur tegangan dan arus. Namun, multimeter analog cenderung kurang akurat dan lebih sulit dibaca dibandingkan dengan multimeter digital.
Sebaliknya, multimeter digital menampilkan hasil pengukuran dalam bentuk angka pada layar LCD, menawarkan kemudahan baca dan akurasi yang lebih tinggi. Multimeter digital sering dilengkapi dengan fitur tambahan seperti pengukuran kapasitansi, frekuensi, dan suhu. Meskipun biasanya lebih mahal dan membutuhkan baterai untuk semua jenis pengukuran, multimeter digital menyediakan keunggulan dalam kemudahan penggunaan dan keakuratan. Fitur auto-ranging pada multimeter digital juga menambah kepraktisan, dengan secara otomatis memilih rentang pengukuran yang sesuai, sehingga mengurangi risiko kesalahan pengukuran dan kerusakan alat. Berikut ini merupakan cara menggunakan multimeter:
a.Pilih Mode Pengukuran:
Langkah pertama dalam menggunakan multimeter adalah menentukan jenis pengukuran yang ingin dilakukan. Setel sakelar pada multimeter ke mode pengukuran yang diinginkan, apakah itu tegangan (volt), arus (ampere), atau resistansi (ohm). Pemilihan mode yang tepat sangat penting untuk mendapatkan hasil pengukuran yang akurat dan mencegah kerusakan pada multimeter.
b.Hubungkan Probes:
Setelah mode pengukuran dipilih, langkah berikutnya adalah menghubungkan probe. Sambungkan probe merah ke terminal positif pada multimeter dan probe hitam ke terminal negatif. Kemudian, tempatkan ujung probe pada titik-titik yang akan diukur dalam rangkaian. Pastikan sambungan dilakukan dengan benar untuk menghindari kesalahan pengukuran dan untuk melindungi pengguna dari potensi bahaya listrik.
c.Baca Nilai:
Setelah probes terhubung dengan benar, hasil pengukuran akan ditampilkan pada multimeter. Pada multimeter digital (DMM), nilai pengukuran akan muncul dalam bentuk angka pada layar LCD, yang memberikan pembacaan yang jelas dan akurat. Pada multimeter analog, hasil pengukuran akan ditunjukkan oleh jarum yang bergerak pada skala. Penting untuk membaca nilai dengan cermat dan memastikan jarum atau angka berada dalam rentang yang benar sesuai dengan pengaturan mode pengukuran yang telah dipilih.
3.1.2 Solder
Gambar 2. Solder
Solder adalah alat yang digunakan untuk menggabungkan komponen elektronik atau logam dengan cara memanaskan dan melelehkan bahan solder sehingga dapat mengikat komponen yang akan disambung. Solder terdiri dari beberapa komponen utama, yaitu besi solder, timah solder, dan flux. Besi solder, atau soldering iron, adalah alat yang dipanaskan listrik untuk melelehkan timah solder. Ujung besi solder, yang disebut mata solder, terbuat dari logam tahan panas dan dirancang untuk mentransfer panas secara efisien ke titik penyolderan.
Timah solder adalah paduan logam yang digunakan sebagai bahan pengikat dalam penyolderan. Timah solder tradisional terdiri dari campuran timah dan timbal, namun dengan meningkatnya kesadaran akan isu kesehatan dan lingkungan, kini banyak digunakan timah solder bebas timbal yang lebih aman. Timah solder biasanya memiliki inti yang berisi flux, yaitu zat kimia yang membantu menghilangkan oksida dari permukaan logam yang akan disolder, sehingga meningkatkan ikatan logam yang kuat dan tahan lama.
Proses penyolderan dimulai dengan memanaskan besi solder hingga mencapai suhu yang cukup untuk melelehkan timah solder. Setelah besi solder panas, ujung mata solder ditempatkan pada titik sambungan, lalu timah solder diaplikasikan ke titik tersebut hingga meleleh dan mengalir mengikat komponen yang disambung. Penting untuk memastikan bahwa kedua permukaan yang disambung cukup panas untuk memastikan sambungan yang kuat dan mencegah sambungan yang dingin (cold joint), yang dapat menyebabkan kegagalan sambungan listrik.
Breadboard adalah perangkat yang digunakan untuk membuat rangkaian elektronik sementara dan prototipe tanpa perlu menyolder komponen. Alat ini terdiri dari papan dengan lubang-lubang kecil yang terhubung secara elektrik, memungkinkan pengguna untuk memasukkan dan menghubungkan komponen seperti resistor, kapasitor, transistor, dan IC dengan mudah. Breadboard memiliki dua bagian utama: bagian tengah yang digunakan untuk menempatkan komponen, dan bagian samping yang biasanya digunakan untuk distribusi daya. Alat ini sangat berguna dalam tahap pengembangan dan pengujian karena memungkinkan modifikasi dan perbaikan rangkaian dengan cepat dan efisien. Breadboard hadir dalam berbagai ukuran, memungkinkan fleksibilitas dalam pembuatan prototipe untuk berbagai proyek elektronik.
3.1.5 Kabel Jumper
Gambar 5. Kabel Jumper
Kabel jumper adalah kabel kecil yang digunakan untuk menghubungkan komponen-komponen elektronik pada sebuah papan sirkuit atau breadboard. Kabel ini memiliki konektor di kedua ujungnya, yang dapat berupa male (jantan) atau female (betina). Kabel jumper sangat penting dalam perancangan dan pengujian sirkuit elektronik karena memudahkan pembuatan koneksi sementara tanpa perlu menyolder komponen. Jenis-jenis kabel jumper meliputi:
a.Kabel Jumper Male-to-Male (M-M): Kabel ini memiliki konektor male di kedua ujungnya. Digunakan untuk menghubungkan dua titik pada breadboard atau menghubungkan titik pada breadboard dengan pin header pada mikrokontroler atau modul.
b.Kabel Jumper Male-to-Female (M-F): Kabel ini memiliki konektor male di satu ujung dan konektor female di ujung lainnya. Biasanya digunakan untuk menghubungkan pin header pada mikrokontroler atau modul dengan perangkat yang memiliki konektor male.
c.Kabel Jumper Female-to-Female (F-F): Kabel ini memiliki konektor female di kedua ujungnya. Umumnya digunakan untuk menghubungkan dua perangkat yang memiliki konektor male, seperti menghubungkan modul sensor dengan mikrokontroler.
3.2 Komponen
3.2.1 Mikrokontroler
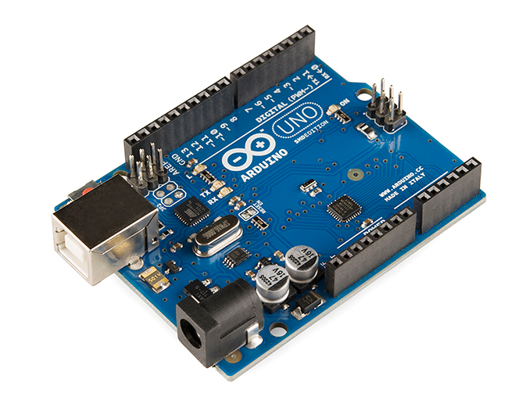
Gambar 6. Arduino Uno
Arduino Uno adalah salah satu papan mikrokontroler paling populer yang dikembangkan oleh Arduino. Arduino Uno menggunakan mikrokontroler ATmega328P sebagai inti dari sistemnya. Papan ini dilengkapi dengan 14 pin input/output digital (di mana 6 di antaranya dapat digunakan sebagai output PWM), 6 pin input analog, resonator keramik 16 MHz, koneksi USB, soket daya, header ICSP, dan tombol reset. Arduino Uno dirancang untuk memudahkan pengguna dalam memprogram mikrokontroler dan berinteraksi dengan berbagai sensor dan aktuator. Papan ini sering digunakan dalam proyek-proyek elektronika dan robotika oleh para hobiis, pelajar, dan profesional untuk menciptakan prototipe perangkat keras dengan cepat dan efisien. Dengan menggunakan perangkat lunak Arduino IDE, pengguna dapat menulis, mengunggah, dan menjalankan kode pada papan Arduino Uno, yang mendukung bahasa pemrograman berbasis Wiring, mirip dengan C++.
3.2.2 Sensor Infrared
Gambar 7. Sensor Infrared
Sensor infrared adalah perangkat yang digunakan untuk mendeteksi radiasi inframerah, yang merupakan jenis radiasi elektromagnetik dengan panjang gelombang lebih panjang dari cahaya tampak tetapi lebih pendek dari gelombang mikro. Sensor ini bekerja dengan prinsip mendeteksi panas yang dipancarkan oleh objek atau lingkungan sekitarnya. Radiasi inframerah biasanya tidak terlihat oleh mata manusia, namun dapat dideteksi oleh sensor infrared. Sensor ini umumnya digunakan dalam berbagai aplikasi, termasuk sistem keamanan, penginderaan jarak jauh, pemantauan lingkungan, dan kontrol otomatis. Misalnya, dalam sistem keamanan, sensor infrared dapat digunakan untuk mendeteksi keberadaan manusia melalui panas tubuh yang dipancarkan. Selain itu, dalam bidang otomasi industri, sensor ini dapat digunakan untuk mengukur suhu tanpa kontak langsung dengan objek. Teknologi ini juga sering diaplikasikan pada remote control untuk mengirimkan sinyal perintah ke perangkat elektronik seperti televisi dan AC. Berikut ini spesifikasi dari sensor infrared proximity:
Gambar 8. Pin Out Sensor Infrared
3.2.3 Sensor Load Cell
Gambar 9. Sensor Load Cell
Sebuah sensor load cell adalah perangkat elektronik yang dirancang khusus untuk mengukur gaya atau beban secara akurat. Sensor ini bekerja berdasarkan prinsip perubahan resistansi listrik pada elemen strain gauge yang terdapat di dalamnya ketika diberikan beban. Ketika beban diterapkan pada sensor load cell, elemen strain gauge mengalami regangan yang mengubah nilai resistansinya. Perubahan ini kemudian dikonversi menjadi sinyal listrik yang proporsional dengan besar gaya atau beban yang diterapkan. Sensor load cell digunakan dalam berbagai aplikasi, mulai dari industri manufaktur untuk mengukur berat benda hingga dalam sistem kontrol proses yang membutuhkan monitoring beban secara real-time. Keunggulan utama sensor load cell adalah kemampuannya dalam memberikan hasil pengukuran yang sangat akurat dan stabil, sehingga sangat berguna dalam situasi di mana presisi pengukuran sangat penting.
3.2.4 Sensor PIR
Gambar 10. Sensor PIR
Sensor PIR (Passive Infrared Sensor) adalah alat yang mendeteksi radiasi inframerah dari objek di sekitarnya. Sensor ini bekerja berdasarkan prinsip bahwa semua objek dengan suhu di atas nol mutlak memancarkan energi inframerah. Ketika ada perubahan jumlah radiasi inframerah yang terdeteksi, misalnya ketika seseorang bergerak melewati sensor, maka sensor PIR akan merespons dengan menghasilkan sinyal listrik.
Sensor PIR memiliki beberapa fitur utama, di antaranya adalah induksi otomatis, di mana ketika seseorang masuk ke dalam jangkauan deteksi, output sensor akan menjadi tinggi, dan setelah orang tersebut keluar dari jangkauan, sensor akan otomatis menunda sebelum mematikan output, mengubahnya menjadi rendah. Sensor ini juga dapat dikontrol berdasarkan intensitas cahaya (opsional) dan memiliki kompensasi suhu (opsional), yang berguna pada suhu lingkungan tinggi seperti di musim panas untuk mempertahankan jarak deteksi yang optimal.
Sensor PIR mendukung dua cara pemicu yang dapat dipilih dengan jumper: pemicu tidak berulang, di mana output akan berubah dari tinggi ke rendah setelah waktu tunda habis, dan pemicu berulang, di mana output akan tetap tinggi selama ada aktivitas manusia dalam jangkauan deteksi, dan akan berubah menjadi rendah setelah tidak ada aktivitas lagi dengan penundaan. Sensor ini juga memiliki waktu blokir induksi (default 2,5 detik) setelah setiap output sensor, selama waktu ini sensor tidak menerima sinyal apapun, yang berguna untuk mencegah gangguan selama pergantian beban.
Sensor PIR beroperasi pada rentang tegangan yang luas (DC 4.5V-20V) dan memiliki konsumsi daya mikro, dengan arus statis kurang dari 50 mikroampere, sehingga sangat cocok untuk produk kontrol otomatis bertenaga baterai. Sinyal output yang tinggi memudahkan integrasi dengan berbagai jenis rangkaian. Keunggulan utama sensor PIR adalah kemampuannya untuk mendeteksi pergerakan tanpa memancarkan radiasi sendiri, sehingga lebih hemat energi dan tidak mengganggu lingkungan sekitar.
Gambar 11. Pin Out Sensor PIR
3.2.5 Sensor Sound
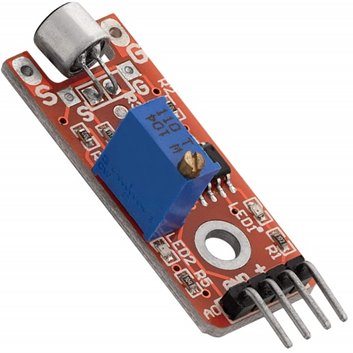
Gambar 12. Sensor Sound KY-038
Sensor suara KY-038 adalah perangkat elektronik yang dirancang untuk mendeteksi suara dan getaran di sekitarnya. Sensor ini terdiri dari mikrofon kondensor yang sensitif terhadap gelombang suara dan dapat menangkap suara dalam rentang frekuensi yang luas. KY-038 dilengkapi dengan dua jenis output: digital dan analog. Output digital memberikan sinyal biner (tinggi atau rendah) berdasarkan ambang batas yang dapat diatur melalui potensiometer, sementara output analog memberikan tegangan variabel yang sebanding dengan intensitas suara yang terdeteksi. Sensor ini sering digunakan dalam berbagai aplikasi, seperti sistem keamanan, monitoring lingkungan, dan proyek-proyek DIY (Do It Yourself) dengan mikrokontroler seperti Arduino. Desainnya yang sederhana dan kemudahan integrasi menjadikan KY-038 pilihan populer untuk pengembang yang membutuhkan solusi deteksi suara yang efektif dan terjangkau.
Gambar 13. Pin Out Sensor Sound KY-038
Spesifikasi Koneksi Sensor Suara KY-038 ke Arduino:
a.Pin + (VCC) ke Arduino 5V:
Fungsi: Menyediakan daya untuk sensor.
Koneksi: Pin + pada sensor KY-038 dihubungkan ke pin 5V pada Arduino.
b.Pin - (GND) ke Arduino GND:
Fungsi: Menyediakan jalur arus balik (ground) untuk sensor.
Koneksi: Pin - pada sensor KY-038 dihubungkan ke pin GND pada Arduino.
c.Pin A0 (Analog Output) ke Arduino A0 (untuk program analog):
Fungsi: Menghasilkan sinyal tegangan analog yang sebanding dengan intensitas suara yang terdeteksi.
Koneksi: Pin A0 pada sensor KY-038 dihubungkan ke pin A0 pada Arduino.
d.Pin D0 (Digital Output) ke Arduino Pin 13 (untuk program digital):
Fungsi: Menghasilkan sinyal digital (tinggi atau rendah) berdasarkan ambang batas yang diatur melalui potensiometer pada sensor.
Koneksi: Pin D0 pada sensor KY-038 dihubungkan ke pin 13 pada Arduino.
3.2.6 Sensor Vibration
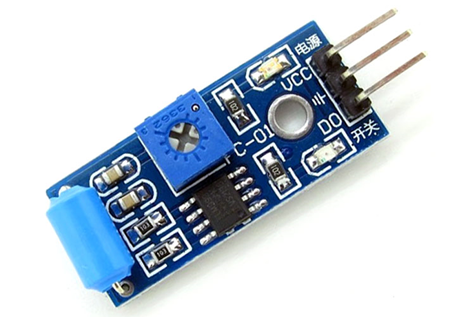
Sensor getaran adalah perangkat yang digunakan untuk mendeteksi dan mengukur getaran atau gerakan mekanis. Sensor ini bekerja berdasarkan prinsip bahwa getaran atau perubahan gerakan akan menghasilkan perubahan dalam parameter fisik tertentu, seperti tegangan atau arus listrik. Salah satu jenis sensor getaran yang umum adalah sensor piezoelektrik, yang menghasilkan tegangan listrik ketika mengalami deformasi mekanis akibat getaran. Sensor getaran digunakan dalam berbagai aplikasi, mulai dari pemantauan kondisi mesin di industri, deteksi gempa bumi, hingga aplikasi keamanan seperti alarm anti-pencurian. Penggunaan sensor getaran memungkinkan identifikasi dini masalah mekanis, sehingga pemeliharaan preventif dapat dilakukan untuk menghindari kerusakan yang lebih parah. Sensor ini memiliki beragam spesifikasi teknis yang dapat disesuaikan dengan kebutuhan aplikasi, termasuk rentang frekuensi, sensitivitas, dan lingkungan operasi.
Gambar 15. Pin Out Sensor Vibration
3.2.7 Modul HX711
Gambar 16. Modul HX711
Modul HX711 adalah sebuah modul penguat (amplifier) yang dirancang khusus untuk mengolah sinyal dari sensor berat atau load cell. Modul ini memiliki kemampuan untuk meningkatkan sinyal analog yang sangat lemah dari load cell menjadi sinyal digital yang dapat diproses oleh mikrokontroler, seperti Arduino. Modul HX711 bekerja dengan menggunakan teknik penguat diferensial untuk mendapatkan hasil yang akurat dari sensor berat. Pada dasarnya, HX711 terdiri dari dua saluran input analog (A dan B), di mana saluran A memiliki dua pengaturan penguatan yang berbeda (128 dan 64), sementara saluran B memiliki penguatan tetap sebesar 32. Modul ini juga dilengkapi dengan konverter analog ke digital (ADC) dengan resolusi 24-bit yang memungkinkan pengukuran sangat presisi. HX711 biasanya digunakan dalam aplikasi yang memerlukan pengukuran berat yang akurat, seperti timbangan digital, karena modul ini dapat mengeliminasi gangguan dan menghasilkan data yang stabil dan akurat. Dengan demikian, modul HX711 adalah pilihan yang populer untuk aplikasi penimbangan dan pengukuran berat yang memerlukan tingkat presisi tinggi.
Gambar 17. Pin Out Modul HX711Z
3.2.8 LED
Gambar 18. LED Hijau
LED, singkatan dari Light Emitting Diode, adalah perangkat semikonduktor yang memancarkan cahaya ketika arus listrik mengalir melaluinya. Prinsip kerja LED didasarkan pada elektroluminesensi, yaitu fenomena di mana material tertentu memancarkan cahaya saat dikenai arus listrik. LED terbuat dari bahan semikonduktor seperti gallium arsenide atau gallium phosphide, yang dikombinasikan dengan elemen lain untuk menghasilkan berbagai warna cahaya.
3.2.9 LCD
Gambar 19. LCD 16×2
LCD (Liquid Crystal Display) adalah sebuah teknologi layar tampilan yang menggunakan sifat optik dari kristal cair untuk menampilkan gambar, teks, dan video. LCD terdiri dari beberapa lapisan, termasuk dua lapisan kaca polarisasi dengan cairan kristal di antara mereka. Ketika arus listrik diterapkan pada cairan kristal, molekul-molekulnya berubah posisi, memungkinkan cahaya untuk melewati atau terblokir oleh lapisan kaca polarisasi tersebut. Proses ini menghasilkan tampilan gambar atau teks pada layar. Berikut ini fitur-fitur LCD:
Modul PCF8574 adalah sebuah chip ekspander I/O yang dirancang untuk berkomunikasi melalui antarmuka I2C (Inter-Integrated Circuit). Modul ini digunakan untuk menambah jumlah pin input/output (I/O) pada mikrokontroler atau mikroprosesor yang memiliki keterbatasan jumlah pin. PCF8574 menyediakan delapan pin I/O tambahan yang dapat dikonfigurasi secara individual sebagai input atau output. Dengan menggunakan protokol I2C, modul ini dapat dihubungkan ke perangkat utama melalui dua jalur komunikasi, yaitu SDA (Serial Data) dan SCL (Serial Clock), memungkinkan hingga delapan modul PCF8574 dihubungkan pada satu bus I2C dengan menggunakan alamat yang berbeda. Keunggulan utama dari modul ini adalah kemampuannya untuk meningkatkan fleksibilitas dan kapasitas I/O tanpa memerlukan banyak jalur tambahan, sehingga sangat berguna dalam aplikasi yang memerlukan banyak kontrol atau pemantauan, seperti dalam sistem kontrol industri, perangkat rumah pintar, dan proyek elektronik lainnya.
Modul PCF8574 memiliki tegangan suplai operasi antara 2,5 hingga 6 V dan konsumsi arus siaga yang rendah, maksimal sebesar 10 µA. Modul ini berfungsi sebagai ekspander port paralel ke I2C dan dilengkapi dengan keluaran interrupt berjenis open-drain. PCF8574 menawarkan port I/O jarak jauh 8-bit untuk bus I2C, sehingga kompatibel dengan sebagian besar mikrokontroler. Modul ini juga memiliki keluaran yang dikunci dengan kemampuan penggerak arus tinggi untuk menggerakkan LED secara langsung. Alamat modul dapat ditentukan oleh tiga pin alamat hardware, memungkinkan penggunaan hingga delapan perangkat (atau hingga 16 perangkat dengan menggunakan PCF8574A). Modul ini tersedia dalam paket DIP16, SO16, atau SSOP20 yang lebih hemat ruang.
Gambar 22. Pin Out Modul PCF 8574 DIP 16 dan SO16
Berikut adalah pinout dari modul PCF8574:
A0 (Pin 1 pada DIP16; Pin 6 pada SO16 SSOP20) - address input 0
A1 (Pin 2 pada DIP16; Pin 7 pada SO16 SSOP20) - address input 1
A2 (Pin 3 pada DIP16; Pin 9 pada SO16 SSOP20) - address input 2
P0 (Pin 4 pada DIP16; Pin 10 pada SO16 SSOP20) - quasi-bidirectional I/O 0
P1 (Pin 5 pada DIP16; Pin 11 pada SO16 SSOP20) - quasi-bidirectional I/O 1
P2 (Pin 6 pada DIP16; Pin 12 pada SO16 SSOP20) - quasi-bidirectional I/O 2
P3 (Pin 7 pada DIP16; Pin 14 pada SO16 SSOP20) - quasi-bidirectional I/O 3
VSS (Pin 8 pada DIP16; Pin 15 pada SO16 SSOP20) - supply ground
P4 (Pin 9 pada DIP16; Pin 16 pada SO16 SSOP20) - quasi-bidirectional I/O 4
P5 (Pin 10 pada DIP16; Pin 17 pada SO16 SSOP20) - quasi-bidirectional I/O 5
P6 (Pin 11 pada DIP16; Pin 19 pada SO16 SSOP20) - quasi-bidirectional I/O 6
P7 (Pin 12 pada DIP16; Pin 20 pada SO16 SSOP20) - quasi-bidirectional I/O 7
INT (Pin 13 pada DIP16; Pin 1 pada SO16 SSOP20) - interrupt output (active LOW)
SCL (Pin 14 pada DIP16; Pin 2 pada SO16 SSOP20) - serial clock line
SDA (Pin 15 pada DIP16; Pin 4 pada SO16 SSOP20) - serial data line
VDD (Pin 16 pada DIP16; Pin 5 pada SO16 SSOP20) - supply voltage
n.c. (not connected):
-Pin 3 pada SO16 SSOP20
-Pin 8 pada SO16 SSOP20
-Pin 13 pada SO16 SSOP20
-Pin 18 pada SO16 SSOP20
3.2.11 Motor servo
Gambar 23. Motor Servo
Motor servo adalah perangkat elektromekanis yang digunakan untuk mengontrol posisi sudut secara presisi. Motor servo umumnya digunakan dalam aplikasi yang memerlukan kontrol posisi yang tepat, seperti dalam robotika, model pesawat terbang, dan berbagai perangkat otomasi. Motor servo biasanya dioperasikan pada tegangan +5V dan memiliki torsi sebesar 2.5 kg/cm. Kecepatan operasionalnya adalah 0.1 detik per 60° dengan tipe gigi plastik, yang memastikan operasi yang halus dan presisi. Rentang rotasi motor servo adalah dari 0° hingga 180°, memungkinkan pergerakan dalam setengah lingkaran penuh. Berat motor servo adalah 9 gram, membuatnya ringan dan mudah dipasang pada berbagai proyek. Paket motor servo biasanya dilengkapi dengan gear horns dan sekrup untuk memudahkan pemasangan dan integrasi dalam sistem.
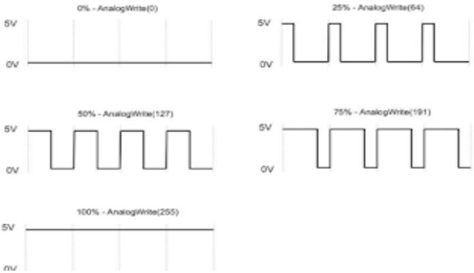
PWM (Pulse Width Modulation) adalah salah satu teknik modulasi dengan mengubah lebar pulsa (duty cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa merupakan kondisi high kemudian berada di zona transisi ke kondisi low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi. Duty Cycle adalah perbandingan antara waktu ON (lebar pulsa High) dengan perioda. Duty Cycle biasanya dinyatakan dalam bentuk persen (%).
•Duty Cycle = tON / ttotal
•tON = Waktu ON atau Waktu dimana tegangan keluaran berada pada posisi tinggi (high atau 1)
•tOFF = Waktu OFF atau Waktu dimana tegangan keluaran berada pada posisi rendah (low atau 0)
•ttotal = Waktu satu siklus atau penjumlahan antara tON dengan tOFF atau disebut juga dengan “periode satu gelombang”
Pada board Arduino Uno, pin yang bisa dimanfaatkan untuk PWM adalah pin yang diberi tanda tilde (~), yaitu pin 3, 5, 6, 9, 10, dan pin 11. Pin-pin tersebut merupakan pin yang bisa difungsikan untuk input analog atau output analog. Oleh sebab itu, jika akan menggunakan PWM pada pin ini, bisa dilakukan dengan perintah analogWrite();. PWM pada arduino bekerja pada frekuensi 500Hz, artinya 500 siklus/ketukan dalam satu detik. Untuk setiap siklus, kita bisa memberi nilai dari 0 hingga 255. Ketika kita memberikan angka 0, berarti pada pin tersebut tidak akan pernah bernilai 5 volt (pin selalu bernilai 0 volt). Sedangkan jika kita memberikan nilai 255, maka sepanjang siklus akan bernilai 5 volt (tidak pernah 0 volt). Jika kita memberikan nilai 127 (kita anggap setengah dari 0 hingga 255, atau 50% dari 255), maka setengah siklus akan bernilai 5 volt, dan setengah siklus lagi akan bernilai 0 volt. Sedangkan jika jika memberikan 25% dari 255 (1/4 x 255 atau 64), maka 1/4 siklus akan bernilai 5 volt, dan 3/4 sisanya akan bernilai 0 volt, dan ini akan terjadi 500 kali dalam 1 detik.
B.ADC (Analog to Digital Converter)
ADC atau Analog to Digital Converter merupakan salah satu perangkat elektronika yang digunakan sebagai penghubung dalam pemrosesan sinyal analog oleh sistem digital. Fungsi utama dari fitur ini adalah mengubah sinyal masukan yang masih dalam bentuk sinyal analog menjadi sinyal digital dengan bentuk kode-kode digital. Ada 2 faktor yang perlu diperhatikan pada proses kerja ADC yaitu kecepatan sampling dan resolusi.
Kecepatan sampling menyatakan seberapa sering perangkat mampu mengkonversi sinyal analog ke dalam bentuk sinyal digital dalam selang waktu yang tertentu. Biasa dinyatakan dalam sample per second (SPS). Sementara Resolusi menyatakan tingkat ketelitian yang dimilliki. Pada Arduino, resolusi yang dimiliki adalah 10 bit atau rentang nilai digital antara 0 - 1023. Dan pada Arduino tegangan referensi yang digunakan adalah 5 volt, hal ini berarti ADC pada Arduino mampu menangani sinyal analog dengan tegangan 0 - 5 volt. Pada Arduino, menggunakan pin analog input yang diawali dengan kode A (A0- A5 pada Arduino Uno). Fungsi untuk mengambil data sinyal input analog menggunakan analogRead(pin);.
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal. Cara Kerja Komunikasi UART: Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudian ditransfer secara parallel ke data bus penerima.
Cara Kerja Komunikasi UART adalah Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudian ditransfer secara parallel ke data bus penerima.
b.Serial Peripheral Interface (SPI)
Serial Peripheral Interface (SPI) merupakan salah satu mode komunikasi serial synchrounous kecepatan tinggi yang dimiliki oleh ATmega 328. Komunikasi SPI membutuhkan 3 jalur yaitu MOSI, MISO, dan SCK. Melalui komunikasi ini data dapat saling dikirimkan baik antara mikrokontroler maupun antara mikrokontroler dengan peripheral lain di luar mikrokontroler.
MOSI: Master Output Slave Input artinya jika dikonfigurasi sebagai master maka pin MOSI sebagai output tetapi jika dikonfigurasi sebagai slave maka pin MOSI sebagai input.
MISO: Master Input Slave Output artinya jika dikonfigurasi sebagai master maka pin MISO sebagai input tetapi jika dikonfigurasi sebagai slave maka pin MISO sebagai output.
SCLK: Clock jika dikonfigurasi sebagai master maka pin CLK berlaku sebagai output tetapi jika dikonfigurasi sebagai slave maka pin CLK berlaku sebagai input.
SS/CS: Slave Select / Chip Select adalah jalur master memilih slave mana yang akan dikirimkan data.
Cara Kerja Komunikasi SPI: Sinyal clock dialirkan dari master ke slave yang berfungsi untuk sinkronisasi. Master dapat memilih slave mana yang akan dikirimkan data melalui slave select, kemudian data dikirimkan dari master ke slave melalui MOSI. Jika master butuh respon data maka slave akan mentransfer data ke master melalui MISO.
c.Inter Integrated Circuit (I2C)
Inter Integrated Circuit atau sering disebut I2C adalah standar komunikasi serial dua arah menggunakan dua saluran yang didisain khusus untuk mengirim maupun menerima data. Sistem I2C terdiri dari saluran SCL (Serial Clock) dan SDA (Serial Data) yang membawa informasi data antara I2C dengan pengontrolnya.
Cara Kerja Komunikasi I2C: Pada I2C, data ditransfer dalam bentuk message yang terdiri dari kondisi start, Address Frame, R/W bit, ACK/NACK bit, Data Frame 1, Data Frame 2, dan kondisi Stop. Kondisi start dimana saat pada SDA beralih dari logika high ke low sebelum SCL. Kondisi stop dimana saat pada SDA beralih dari logika low ke high sebelum SCL. R/W bit berfungsi untuk menentukan apakah master mengirim data ke slave atau meminta data dari slave. (logika 0= mengirim data ke slave, logika 1 = meminta data dari slave). ACK/NACK bit berfungsi sebagai pemberi kabar jika data frame ataupun address frame telah diterima receiver.




































.png)




Tidak ada komentar:
Posting Komentar