1. Pendahuluan [Kembali]
2. Tujuan [Kembali]
- Merangkai dan menguji aplikasi output pada mikrokontroller Arduino
- Merangkai dan menguji input pada mikrokontroller Arduino
- Merangkai dan menguji I/O pada mikrokontroller Arduino
- Mengetahui bentuk rangkaian dan mensimulasikan pengaplikasian mikrokontroller Arduino pada software proteus.
3. Alat dan Bahan [Kembali]

Terminals Mode

Generator


1) Resistor

Spesifikasi:

2) Dioda


3) Op-Amp 741

Spesifikasi dari IC UA741 meliputi berikut ini:
• Supply tegangan ±18V
• Perbedaan tegangan input daya adalah ±15V
• Rasio penolakan mode umum adalah 90dB
• Amplifikasi tegangan diferensial adalah 200V/mv
• Arus supply adalah 1.5mA
• Pin ini dapat diakses dalam berbagai paket seperti paket 8-Pin PDIP, VSSOP, & SOIC



4) Sensor MQ-2

5) Button

Technical Specifications
- Mode of Operation: Tactile feedback
- Power Rating: MAX 50mA 24V DC
- Insulation Resistance: 100Mohm at 100v
- Operating Force: 2.55±0.69 N
- Contact Resistance: MAX 100mOhm
- Operating Temperature Range: -20 to +70
- Storage Temperature Range: -20 to +70 ℃
6) Relay

Spesifikasi Relay:

7) IC ULN 2003A

7) Switch

1) Motor Stepper

2) LED-Red dan Yellow




4. Dasar Teori [Kembali]
-Switch
Saklar atau dalam bahasa Inggris disebut Switch adalah salah satu komponen yang penting dalam setiap rangkaian atau perangkat elektronik. Seperti pada artikel yang disebutkan sebelumnya, Saklar atau Switch adalah perangkat yang digunakan untuk memutuskan atau menghubungkan aliran arus listrik. Meskipun saat ini telah banyak yang menggunakan saklar atau switch elektronik yang menggunakan sensor ataupun rangkaian yang terdiri komponen semikonduktor seperti transistor, IC dan dioda. Namun saklar mekanik atau mechanical switch masih tetap memegang peranan penting pada hampir semua perangkat atau peralatan listrik dan elektronik.
Saklar pada dasarnya merupakan perangkat mekanik yang terdiri dari dua atau lebih terminal yang terhubung secara internal ke bilah atau kontak logam yang dapat dibuka dan ditutup oleh penggunanya. Aliran listrik akan mengalir apabila suatu kontak dihubungkan dengan kontak lainnya. Sebaliknya, aliran listrik akan terputus apabila hubungan tersebut dibuka atau dipisahkan. Selain sebagai komponen untuk menghidupkan (ON) dan mematikan (OFF) perangkat elektronik, Saklar sering juga difungsikan sebagai pengendali untuk mengaktifkan fitur-fitur tertentu pada suatu rangkaian listrik. Contohnya seperti pengatur tegangan pada pencatu daya, Sebagai pengatur Volume di Ponsel ataupun sebagai pengatur.
Seiring dengan perkembangan zaman dan teknologi, saklar yang kita gunakan saat ini juga memiliki bentuk dan desain yang berbeda-beda. Ada banyak cara untuk melakukan penggolongan terhadap saklar mekanik ini, salah satunya adalah penggolongan dengan bentuk dan gerakan yang dapat digunakan oleh penggunanya dalam menutup dan membuka kontak.
Jenis-jenis Saklar (Switch) dalam Rangkaian Elektronika
Berikut ini adalah jenis-jenis Saklar listrik mekanik yang digolongkan berdasarkan cara gerakan saklarnya.

1. Push Button Switch (Saklar Tombol Dorong)
Push Button Switch dalam bahasa Indonesia dapat diterjemahkan menjadi saklar tombol dorong adalah jenis saklar dua posisi yang dapat menghubungkan aliran arus listrik pada saat pengguna menekannya dan memutuskan hubungan listrik tersebut apabila kita melepaskannya.
2. Toggle Switch (Saklar Pengalih)
Toggle Switch atau Saklar Pengalih adalah saklar yang digerakan oleh tuas atau toggle yang miring ke salah satu posisi dari dua posisi atau lebih untuk menghubungkan atau memutuskan aliran listrik. Kebanyakan Saklar Tuas atau Toggle Switch dirancang menetap pada satu posisi, namun ada juga jenis saklar tuas yang memiliki mekanisme pegas internal untuk mengembalikan tuas ke posisi tertentu.
3. Selector Switch (Saklar Pemilih)
Selector Switch atau Saklar Pemilih adalah saklar yang dioperasikan dengan cara memutar dan biasanya digunakan pada rangkaian yang memerlukan pilihan lebih dari 2 posisi. Penggunanya dapat memutar dengan jari tangannya untuk memilih posisi tertentu. Selector Switch ini biasanya diaplikasikan pada Pencatu Daya untuk memilih tegangan yang diinginkan, sebagai pemilih fungsi pengujian (Ohm, Volt, Ampere) pada Multimeter, Pemilih Suhu pada Oven dan lain sebagainya. Pada umumnya, tuas atau kontak Selector Switch ini akan menetap di satu posisi, namun ada juga Selector Switch atau Saklar Pemilih yang memiliki mekanisme pegas internal untuk mengembalikannya ke posisi semula apabila tidak ada yang menahannya (Contoh Selector Switch pada starter mobil). Selector Switch atau Saklar Pemilihnya juga sering disebut dengan Rotary Switch.
4. Limit Switch (Saklar Pembatas)
Limit Switch atau Saklar Pembatas adalah saklar yang banyak digunakan pada mesin-mesin untuk keperluan otomasi industry. Umumnya, di ujung tuas saklar pembatas ini terdapat sebuah bantalan (bearing) roller kecil yang berfungsi untuk mencegah aus-nya tuas pada limit switch tersebut karena kontak berulang kali dengan bagian-bagian mesin. Limit switch atau saklar pembatas biasanya digunakan untuk mengendalikan mesin sebagai bagian dari sistem pengendali, sebagai pengaman dan penguncian ataupun menghitung objek yang melewati suatu titik. Sederhananya, sebuah limit switch atau saklar pembatas biasanya terdiri dari actuator atau tuas yang secara mekanis terkait dengan sekumpulan kontak. Ketika suatu benda bersentuhan dengan actuator, limit switch tersebut akan mengoperasikan kontaknya untuk menghubungkan atau memutuskan sambungan aliran listrik.
Penggolongan Saklar lainnya
Selain penggolongan berdasarkan bentuk dan gerakannya, saklar mekanis atau mechanical switch juga dapat diklasifikasikan berdasarkan jumlah kontak dan kondisi yang dimilikinya seperti :
- SPST : Single Pole Single Throw
- SPDT : Single Pole Double Throw
- DPST : Double Pole Single Throw
- DPDT : Double Pole Double Throw
- SP6T : Single Pole Six Throw
- Dan lain sebagainya
-Sensor touch
Touch Sensor atau Sensor Sentuh adalah sensor elektronik yang dapat mendeteksi sentuhan. Sensor Sentuh ini pada dasarnya beroperasi sebagai sakelar apabila disentuh, seperti sakelar pada lampu, layar sentuh ponsel dan lain sebagainya. Sensor Sentuh ini dikenal juga sebagai Sensor Taktil (Tactile Sensor). Seiring dengan perkembangan teknologi, sensor sentuh ini semakin banyak digunakan dan telah menggeser peranan sakelar mekanik pada perangkat-perangkat elektronik.

Berdasarkan fungsinya, Sensor Sentuh dapat dibedakan menjadi dua jenis utama yaitu Sensor Kapasitif dan Sensor Resistif. Sensor Kapasitif atau Capacitive Sensor bekerja dengan mengukur kapasitansi sedangkan sensor Resistif bekerja dengan mengukur tekanan yang diberikan pada permukaannya.
Sensor Sentuh Kapasitif
Sensor sentuh Kapasitif merupakan sensor sentuh yang sangat populer pada saat ini, hal ini dikarenakan Sensor Kapasitif lebih kuat, tahan lama dan mudah digunakan serta harga yang relatif lebih murah dari sensor resistif. Ponsel-ponsel pintar saat ini telah banyak yang menggunakan teknologi ini karena juga menghasilkan respon yang lebih akurat.
Berbeda dengan Sensor Resistif yang menggunakan tekanan tertentu untuk merasakan perubahan pada permukaan layar, Sensor Kapasitif memanfaatkan sifat konduktif alami pada tubuh manusia untuk mendeteksi perubahan layar sentuhnya. Layar sentuh sensor kapasitif ini terbuat dari bahan konduktif (biasanya Indium Tin Oxide atau disingkat dengan ITO) yang dilapisi oleh kaca tipis dan hanya bisa disentuh oleh jari manusia atau stylus khusus ataupun sarung khusus yang memiliki sifat konduktif.
Pada saat jari menyentuh layar, akan terjadi perubahaan medan listrik pada layar sentuh tersebut dan kemudian di respon oleh processor untuk membaca pergerakan jari tangan tersebut. Jadi perlu diperhatikan bahwa sentuhan kita tidak akan di respon oleh layar sensor kapasitif ini apabila kita menggunakan bahan-bahan non-konduktif sebagai perantara jari tangan dan layar sentuh tersebut.
Sensor Sentuh Resistif
Tidak seperti sensor sentuh kapasitif, sensor sentuh resistif ini tidak tergantung pada sifat listrik yang terjadi pada konduktivitas pelat logam. Sensor Resistif bekerja dengan mengukur tekanan yang diberikan pada permukaannya. Karena tidak perlu mengukur perbedaan kapasitansi, sensor sentuh resistif ini dapat beroperasi pada bahan non-konduktif seperti pena, stylus atau jari di dalam sarung tangan.
Sensor sentuh resistif terdiri dari dua lapisan konduktif yang dipisahkan oleh jarak atau celah yang sangat kecil. Dua lapisan konduktif (lapisan atas dan lapisan bawah) ini pada dasarnya terbuat dari sebuah film. Film-film umumnya dilapisi oleh Indium Tin Oxide yang merupakan konduktor listrik yang baik dan juga transparan (bening).
Cara kerjanya hampir sama dengan sebuah sakelar, pada saat film lapisan atas mendapatkan tekanan tertentu baik dengan jari maupun stylus, maka film lapisan atas akan bersentuhan dengan film lapisan bawah sehingga menimbulkan aliran listrik pada titik koordinat tertentu layar tersebut dan memberikan signal ke prosesor untuk melakukan proses selanjutnya.
Grafik Respon Sensor Touch:

- Sensor LM35
Sensor suhu LM35 adalah komponen elektronika yang memiliki fungsi untuk mengubah besaran suhu menjadi besaran listrik dalam bentuk tegangan. Sensor Suhu LM35 yang dipakai dalam penelitian ini berupa komponen elektronika elektronika yang diproduksi oleh National Semiconductor. LM35 memiliki keakuratan tinggi dan kemudahan perancangan jika dibandingkan dengan sensor suhu yang lain, LM35 juga mempunyaikeluaran impedansi yang rendah dan linieritas yang tinggi sehingga dapat dengan mudah dihubungkan dengan rangkaian kendali khusus serta tidak memerlukan penyetelan lanjutan.





 |
- Pin 1 merupakan heater internal yang terhubung dengan ground.
- Pin 2 merupakan tegangan sumber (VC) dimana Vc < 24 VDC.
- Pin 3 (VH) digunakan untuk tegangan pada pemanas (heater internal) dimana VH = 5VDC.
- Pin 4 merupakan output yang akan menghasilkan tegangan analog.

-Resistor
Resistor merupakan komponen pasif yang memiliki nilai resistansi tertentu dan berfungsi untuk menghambat jumlah arus listrik yang mengalir dalam suatu rangkaian. Resistor dapat diklasifikasikan menjadi beberapa jenis, diantaranya resistor nilai tetap (fixed resistor), resistor variabel (variabel resistor), thermistor, dan LDR.




Cara membaca nilai resistor
Cara menghitung nilai resistansi resistor dengan gelang warna :
1. Masukan angka langsung dari kode warna gelang pertama.
2. Masukan angka langsung dari kode warna gelang kedua.
3. Masukan angka langsung dari kode warna gelang ketiga.
4. Masukkan jumlah nol dari kode warna gelang ke-4 atau pangkatkan angka tersebut dengan 10 (10^n).
5. Gelang terakhir merupakan nilai toleransi dari resistor

- Diode
Cara Kerja Dioda:
Secara sederhana, cara kerja dioda dapat dijelaskan dalam tiga kondisi, yaitu kondisi tanpa tegangan (unbiased), diberikan tegangan positif (forward biased), dan tegangan negatif (reverse biased).
a. tanpa tegangan

Pada kondisi tidak diberikan tegangan akan terbentuk suatu perbatasan medan listrik pada daerah P-N junction. Hal ini terjadi diawali dengan proses difusi, yaitu bergeraknya muatan elektro dari sisi n ke sisi p.
b. kondisi forward bias

Pada kondisi ini, bagian anoda disambungkan dengan terminal positif sumber listrik dan bagian katoda disambungkan dengan terminal negatif. Adanya tegangan eksternal akan mengakibatkan ion-ion yang menjadi penghalang aliran listrik menjadi tertarik ke masing-masing kutub. Ion-ion negatif akan tertarik ke sisi anoda yang positif, dan ion-ion positif akan tertarik ke sisi katoda yang negatif.
c. kondisi reverse bias

Pada kondisi ini, bagian anoda disambungkan dengan terminal negatif sumber listrik dan bagian katoda disambungkan dengan terminal positif. Adanya tegangan eksternal akan mengakibatkan ion-ion yang menjadi penghalang aliran listrik menjadi tertarik ke masing-masing kutub.
- Relay
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A.

Ada besi atau yang disebut dengan nama inti besi dililit oleh sebuah kumparan yang berfungsi sebagai pengendali. Sehingga kumparan kumparan yang diberikan arus listrik maka akan menghasilkan gaya elektromagnet. Gaya tersebut selanjutnya akan menarik angker untuk pindah dari biasanya tutup ke buka normal. Dengan demikian saklar menjadi pada posisi baru yang biasanya terbuka yang dapat menghantarkan arus listrik. Ketika armature sudah tidak dialiri arus listrik lagi maka ia akan kembali pada posisi awal, yaitu normal close.
Fitur:
1. Tegangan pemicu (tegangan kumparan) 5V
2. Arus pemicu 70mA
3. Beban maksimum AC 10A @ 250 / 125V
4. Maksimum baban DC 10A @ 30 / 28V
5. Switching maksimum
- IC OP AMP
Penguat operasional atau yang dikenal sebagai Op-Amp merupakan suatu rangkaian terintegrasi atau IC yang memiliki fungsi sebagai penguat sinyal, dengan beberapa konfigurasi. Secara ideal Op-Amp memiliki impedansi masukan dan penguatan yang tak berhingga serta impedansi keluaran sama dengan nol. Dalam prakteknya, Op-Amp memiliki impedansi masukan dan penguatan yang besar serta impedansi keluaran yang kecil.

b. Inverting dan non inverting amplifier



Op-Amp memiliki beberapa karakteristik, diantaranya:
a. Penguat tegangan tak berhingga (AV = ∼)
b. Impedansi input tak berhingga (rin = ∼)
c. Impedansi output nol (ro = 0) d. Bandwidth tak berhingga (BW = ∼)
d. Tegangan offset nol pada tegangan input (Eo = 0 untuk Ein = 0)
 |
Grafik input dan output op amp |



Karakteristik IC OpAmp
- Penguatan Tegangan Open-loop atau Av = ∞ (tak terhingga)
- Tegangan Offset Keluaran (Output Offset Voltage) atau Voo = 0 (nol)
- Impedansi Masukan (Input Impedance) atau Zin= ∞ (tak terhingga)
- Impedansi Output (Output Impedance ) atau Zout = 0 (nol)
- Lebar Pita (Bandwidth) atau BW = ∞ (tak terhingga)
- Karakteristik tidak berubah dengan suhu
Karakteristik IC OpAmp
- Penguatan Tegangan Open-loop atau Av = ∞ (tak terhingga)
- Tegangan Offset Keluaran (Output Offset Voltage) atau Voo = 0 (nol)
- Impedansi Masukan (Input Impedance) atau Zin= ∞ (tak terhingga)
- Impedansi Output (Output Impedance ) atau Zout = 0 (nol)
- Lebar Pita (Bandwidth) atau BW = ∞ (tak terhingga)
- Karakteristik tidak berubah dengan suhu

Inverting Amplifier

Rumus:

NonInverting

Rumus:

Komparator

Rumus:

Adder

Rumus:

Bentuk Gelombang

- IC ULN2003A
salah satu bagian stator motor DC-STP adalah berupa cakram inti besi melingkar yang diberi kumparan dan berfungsi sebagai pembangkit medan elektro-magnet ketika motor DC-STP diberi tegangan catu.

Syarat aliran arus listrik dapat mengalir pada sebuah kumparan listrik berinti besi sehingga menimbulkan medan elektro-magnet adalah adanya beda potensial pada kedua ujung kumparan listrik. Sehingga pada kumparan A (coil A) gambar 1 akan timbul medan elektro-magnet apabila kutub kumparan A diberi tegangan negatif (GND), karena pada kutub kumparan yang lainnya telah diberi tegangan positif (+Vcc).

Gambar 2. Kumparan listrik pada motor DC-STP 4-fasa
Prinsip kerja motor DC-STP adalah memutar rotornya yang berupa magnet batang bergigi lebih dari satu (dengan kutub magnet yang bervariasi) dengan bantuan medan elektro-magnet yang terbangkitkan oleh adanya aliran listrik pada kumparan listriknya.
Sebagai contoh, gambar 2 merupakan ilustrasi sebuah motor DC-STP yang memiliki 4-fasa atau 4-kumparan listrik. Untuk menjadikan rotor pada motor DC-STP berputar, maka pada kumparan listrik statornya harus diberi tegangan catu. Pada gambar 2 terlihat bahwa salah satu kutub kumparan (dari keempat kumparan listrik) digabungkan dan diberi catu tegangan positif (+Vcc). Tegangan catu pada gabungan salah satu kutub kumparan disbut juga dengan tegangan bersama (common voltage). Oleh sebab itu untuk membangkitkan medan elektro-magnet pada tiap-tiap kumparan listrik, maka pada kutub yang selainnya (yang tidak digabung) harus diberi tegangan negatif (GND). Namun pemberian tegangan catu negatif tersebut harus dilakukan secara bergantian dengan waktu tunda tertentu.
Misalnya, kumparan A diaktifkan (diberi tegangan negatif) selama 500 mili-second (waktu tunda), setelah durasi waktu tunda selesai maka kumparan A dinon-aktifkan (tidak diberi tegangan catu atau diberi tegangan +Vcc juga) dan kumparan B yang gantian diaktifkan dengan waktu tunda yang sama, yaitu 500 mili-second. Demikian seterusnya sampai kumparan D diaktifkan. Apabila kumparan D telah diaktifkan dan waktu tundanya usai, proses aktivasi kumparan tersebut diulang kembali dari awal, yaitu dimulai kembali dari aktivasi kumparan A. Pada setiap aktivasi kumparan listrik akan menimbulkan medan elektro-magnet, dimana kumparan yang teraktivasi akan menjadi magnet tidak tetap dengan kutub magnet tertentu, yaitu berkutub magnet utara (U) atau berkutub magnet selatan (S) tergantung dengan arah putaran lilitan kumparan kawatnya. Aktivasi kumparan A-B-C-D-A secara bergantian akan menjadikan bagian rotor motor DC-STP (yang juga merupakan magnet tetap dengan kutub yang bervariasi) berputar sebesar 360 derajat (1-putaran). Gerak putar rotor motor DC-STP terjadi karena munculnya sifat magnet antara rotor dan statornya, yaitu pertemuan kutub-kutub magnet senama akan tolak-menolak dan sebaliknya pertemuan kutub-kutub magnet tak-senama akan tarik-menarik.

Gambar 3. Driver motor DC-STP menggunakan IC ULN2003A
Gambar 3 merupakan skematik driver motor DC-STP yang menggunakan IC ULN2003A. Di dalam IC ULN2003A terdapat 7 buah rangkaian transistor darlington yang membentuk logika kerja seperti gerbang logika NOT (inverter/pembalik kondisi). Sehingga dalam penggunaannya akan lebih mudah mengingat bahwa IC ULN2003A itu berisi gerbang NOT dari pada mengingat bahwa IC ULN2003A itu berisi rangkaian transistor darlington. Untuk lebih memahaminya, mari melihat gambar konfigurasi pin IC ULN2003A pada gambar 4 berikut.

Gambar 4. Konfigurasi pin/kaki IC ULN2003A
Dengan melihat gambar 4, dapat diketahui bahwa dengan memberikan logika low (tegangan 0 volt) pada kaki In1 maka akan menghasilkan kondisi keluaran (output) pada kaki Out1 berlogika high (tegangan ±5 volt). Demikian juga sebaliknya, dengan memberikan logika high (tegangan ±5 volt) pada kaki In1 maka akan menghasilkan kondisi keluaran (output) pada kaki Out1 berlogika low (tegangan 0 volt).
Berikut ini adalah tabel aktivasi input IC ULN2003A driver motor DC-STP untuk mode 1 langkah dan mode ½ langkah. Tabel ini disesuaikan dari artikel terdahulu yang berjudul “Motor DC Stepper (DC-STP)”.

Tabel 2. Mode pemberian tegangan catu motor DC-STP (mode ½ langkah)

Pada gambar 3, kondisi logika kaki output yang terhubung dengan kutub kumparan listrik motor DC-STP dapat diatur dengan menggunakan kaki-kaki mikrokontroler AVR ATMEGA8/48/168/328 (Pin PC0, PC1, PC2, dan PC3) yang terhubung dengan kaki input IC ULN2003A, yaitu pada kaki In1, In2, In3, dan In4. Program mikrokontroler yang dibuat harus mengatur aktivasi kumparan listrik pada motor DC-STP secara bergantian dengan waktu tunda yang tepat untuk menghasilkan putaran pada rotornya. Pengaturan aktivasi kumparan listrik tersebut dapat dilakukan dengan mengikuti tabel 1 untuk mode 1 langkah dan tabel 2 untuk mode ½ langkah.
- Potensiometer




- Motor Stepper
Motor stepper adalah jenis motor yang berputar dengan langkah diskrit. Input yang diterima oleh motor stepper berasal dari pulsa-pulsa digital, berbeda dengan motor DC konvensional yang bekerja berdasarkan komutasi pada komponen brush (sikat) nya.
Langkah yang mengontrol pergerakan motor berasal dari kumparan yang tersusun dalam beberapa kelompok yang disebut fase. Motor stepper dapat berputar ketika diberikan energi pada fase secara berurutan.
Motor stepper mengubah sinyal listrik menjadi gerakan mekanis yang berupa langkah-langkah yang teratur.
Kamu dapat mengontrol langkah pada motor menggunakan mikrokontroler atau rangkaian digital.
Meskipun torsi motor stepper tidak sebesar motor DC, namun motor ini memiliki tingkat presisi yang tinggi dalam putarannya.
Kecepatan gerakan pada motor stepper diukur dalam step per second atau jumlah langkah per detik.
Konstruksi Motor Stepper
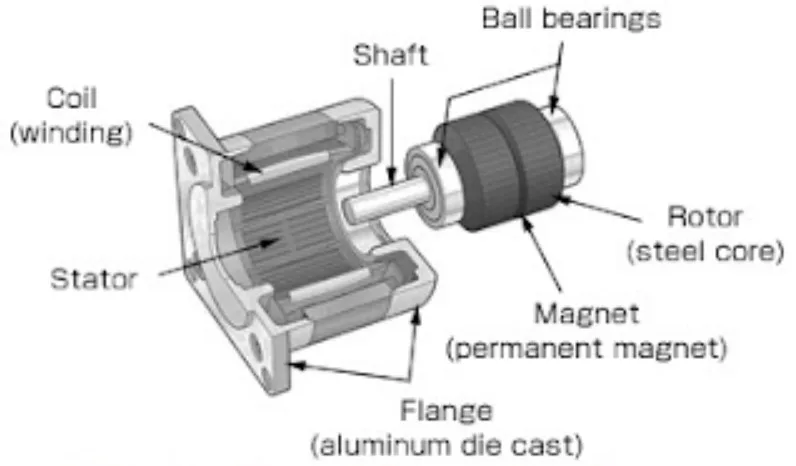
Pada dasarnya, motor stepper memiliki konstruksi yang sama dengan motor listrik pada umumnya, yaitu terdiri dari rotor dan stator.
Namun, motor stepper tidak memiliki sikat karena putarannya dikontrol dengan memberikan pulsa diskrit pada kumparan motor.
Stator pada motor DC terbuat dari logam yang dikelilingi oleh belitan. Belitan ini tidak dililitkan pada seluruh bagian stator, tetapi pada gigi stator secara individu, sehingga mirip dengan motor brushless. Belitan ini terhubung pada input dan diberikan pulsa digital.
Sementara itu, rotor pada motor stepper terbuat dari besi lunak atau magnet. Rotor akan merespon medan magnet pada belitan stator dan bergerak sesuai dengan sudut stepnya. Motor stepper dapat dikontrol posisinya tanpa mekanisme umpan balik (feedback).
Cara Kerja Motor Stepper
Setelah memahami Apa Itu Motor Stepper, selanjutnya secara prinsip, cara kerja motor stepper berbeda-beda tergantung pada konstruksi rotor dan stator serta mekanisme belitan pada stator. Namun, setiap stepper diatur oleh pulsa digital yang diubah secara periodik.
Kecepatan sinyal pulsa digital atau frekuensi sinyal mempengaruhi kecepatan motor stepper. Semakin cepat frekuensi sinyal, maka semakin cepat juga RPM pada stepper.
Sinyal digital ini dapat digunakan untuk menentukan posisi pada motor stepper. Sebagai contoh, pada stepper dengan sudut step 1.8°, satu putaran penuh membutuhkan 200 step, sehingga untuk setengah putaran stepper dibutuhkan 100 step dan untuk satu setengah putaran dibutuhkan 300 step. Karena itu, stepper sering digunakan pada mesin printer 3D dan CNC engraving.
Sinyal digital yang diberikan pada rotor menciptakan medan magnetik yang terkait dengan rotor pada motor stepper.
Ini menyebabkan motor bergerak pada satu sudut step-nya dan tetap pada posisi tersebut sampai sinyal digital selanjutnya.
Kelebihan dan Kekurangan Motor Stepper
Sudah mengetahui Apa Itu Motor Stepper?, sekarang setelah kita memahami prinsip kerja motor stepper, ada baiknya untuk merangkum kelebihan dan kekurangannya dibandingkan dengan jenis motor lainnya.
Berikut adalah kelebihan dari motor stepper:
- Tidak memerlukan sensor posisi karena struktur internalnya. Motor stepper dapat bergerak dengan melakukan “step” dan Kamu hanya perlu menghitung jumlah step-nya untuk menentukan posisi motor pada waktu tertentu.
- Kontrol motor stepper cukup sederhana. Motor memerlukan driver, tetapi tidak memerlukan perhitungan atau penyetelan yang rumit untuk dapat bekerja dengan baik. Secara umum, usaha pengendalian lebih rendah dibandingkan dengan motor lainnya. Dengan microstepping, Kamu dapat mencapai akurasi posisi yang cukup tinggi, mencapai sekitar 0,007°.
- Motor stepper memberikan torsi yang baik pada kecepatan rendah, cocok untuk posisi menahan, dan juga cenderung memiliki masa pakai yang lebih panjang.
Berikut adalah kekurangan dari motor stepper:
- Motor stepper dapat melewatkan satu step jika torsi beban terlalu tinggi. Hal ini dapat mempengaruhi kontrol motor karena tidak ada cara untuk mengetahui posisi sebenarnya dari motor. Penggunaan microstepping dapat membuat motor stepper lebih mungkin mengalami masalah ini.
- Motor ini selalu mengalirkan arus maksimum bahkan saat diam, yang memperburuk efisiensi dan dapat menyebabkan panas berlebih.
- Motor stepper memiliki torsi rendah dan menjadi sangat bising pada kecepatan tinggi.
- Kepadatan daya dari motor stepper rendah dan rasio torsi-ke-inersia juga rendah.
Jenis Motor Stepper
Nah setelah memahami arti Apa Itu Motor Stepper, selanjutnya motor stepper memiliki beberapa gategori. Berdasarkan struktur rotor dan statornya, motor stepper terdiri atas 3 jenis umum yaitu :
1. Variable Reluctance (VR)
Motor stepper jenis VR adalah jenis yang paling sederhana. Motor ini terdiri dari rotor berbahan besi lunak dengan beberapa gigi dan dikelilingi oleh belitan stator.
Stator sendiri terdiri dari beberapa belitan yang terhubung langsung dengan inputnya. Belitan ini menentukan sudut step pada motor.
Rotasi pada motor terjadi ketika gigi rotor ditarik ke kutub stator akibat pulsa digital yang diberikan.
Pulsa digital membawa daya listrik sehingga menimbulkan medan elektromagnetik pada belitan stator.
Magnet pada motor stepper tipe VR lebih kecil dan ringan daripada jenis permanen magnet, sehingga dapat bergerak lebih cepat.
Semakin kecil jarak antara rotor dan gigi stator dari stepper VR, semakin kecil juga gaya magnetiknya.
2. Permanen Magnet (PM)
Stepper tipe ini menggunakan magnet permanen pada rotor dan bekerja dengan atraksi atau tolakan antara rotor dan stator elektromagnetik.
Berbeda dengan tipe Variable Reluctance, tipe Permanen Magnet tidak memiliki gigi pada rotornya.
Sebagai gantinya, stepper PM menggunakan magnet dengan kutub utara dan selatan bergantian dengan garis lurus sejajar dengan poros rotor.
Kutub magnet pada rotor ini menghasilkan peningkatan intensitas fluks sehingga torsi motor lebih tinggi dibandingkan dengan stepper tipe VR.
3. Stepper Hybrid
Stepper Hybrid merupakan gabungan dari dua jenis stepper sebelumnya, yaitu Variable Reluctance dan Permanen Magnet, dengan tujuan memberikan daya maksimum dalam kemasan yang lebih kecil.
Karena konstruksinya yang digabungkan, harga stepper Hybrid lebih mahal dibandingkan dua jenis stepper lainnya. Namun, stepper ini memiliki kombinasi sifat terbaik dari keduanya.
Jenis Hybrid memberikan kinerja yang lebih baik dalam hal resolusi, torsi, dan kecepatan. Rotor pada stepper ini memiliki multi-gerigi seperti tipe VR dan berisi magnet konsentrik aksial sekitar porosnya.
Stepper ini dapat menghasilkan sudut step yang tinggi, antara 3.6° hingga 0.9° per step. Artinya, dibutuhkan 100 hingga 400 langkah untuk setiap putaran penuh pada motor.
Berdasarkan sitem lilitan pada statornya, stepper dibagi menjadi dua jenis utama yaitu :
a. Stepper Unipolar
Stepper jenis ini terdiri dari dua lilitan yang memiliki cabang tengah atau center tap. Cabang tengah dari masing-masing lilitan dapat bersatu atau terpisah, tergantung pada datasheet motor.
Biasanya yang paling umum adalah stepper unipolar dengan cabang tengah yang disatukan sehingga terdapat 5 input.
Cabang tengah pada stepper ini dapat dihubungkan ke ground atau ke VCC, tergantung pada spesifikasi pada datasheet motor dan driver yang digunakan.
b. Stepper Bipolar
Stepper bipolar tidak memiliki cabang tengah (center tap). Jenis ini memiliki kelebihan yaitu torsi yang lebih besar dibandingkan dengan unipolar dengan ukuran yang sama.
Motor stepper bipolar hanya memiliki empat input. Namun, mengontrol motor jenis ini lebih rumit dibandingkan dengan motor jenis unipolar.
Untuk mengontrol stepper bipolar, diperlukan sinyal digital yang berubah-ubah dari positif ke negatif pada setiap lilitannya.
Hal ini bertujuan untuk menghasilkan fluktuasi magnetik yang berubah-ubah sehingga rotor dapat berputar sesuai dengan sudut stepnya.
Spesifikasi battery : 12 V
Baterai adalah perangkat yang terdiri dari satu atau lebih sel elektrokimia dengan koneksi eksternal yang disediakan untuk memberi daya pada perangkat listrik seperti senter, ponsel, dan mobil listrik. Ketika baterai memasok daya listrik, terminal positifnya adalah katode dan terminal negatifnya adalah anoda. Terminal bertanda negatif adalah sumber elektron yang akan mengalir melalui rangkaian listrik eksternal ke terminal positif. Ketika baterai dihubungkan ke beban listrik eksternal, reaksi redoks mengubah reaktan berenergi tinggi ke produk berenergi lebih rendah, dan perbedaan energi-bebas dikirim ke sirkuit eksternal sebagai energi listrik. Secara historis istilah "baterai" secara khusus mengacu pada perangkat yang terdiri dari beberapa sel, namun penggunaannya telah berkembang untuk memasukkan perangkat yang terdiri dari satu sel. Kutub yang bertanda positif menandakan bahwa memiliki energi potensial yang lebih tinggi daripada kutub bertanda negatif. Kutub bertanda negatif adalah sumber elektron yang ketika disambungkan dengan rangkaian eksternal akan mengalir dan memberikan energi ke peralatan eksternal. Ketika baterai dihubungkan dengan rangkaian eksternal, elektrolit dapat berpindah sebagai ion didalamnya, sehingga terjadi reaksi kimia pada kedua kutubnya. Perpindahan ion dalam baterai akan mengalirkan arus listrik keluar dari baterai sehingga menghasilkan kerja. Meski sebutan baterai secara teknis adalah alat dengan beberapa sel, sel tunggal juga umumnya disebut baterai.
- Lampu

Light Emitting Diode atau sering disingkat dengan LED adalah komponen elektronika yang dapat memancarkan cahaya monokromatik ketika diberikan tegangan maju. LED merupakan keluarga Dioda yang terbuat dari bahan semikonduktor.

Bagian-bagian arduino uno:
-Power USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
-Power jack
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
-Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
-Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
-Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
-Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
-RAM
RAM (Random Access Memory) adalah tempat penyimpanan sementara pada komputer yang isinya dapat diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM (Dynamic Random Acces Memory).
-ROM
ROM (Read-only Memory) adalah perangkat keras pada computer yang dapat menyimpan data secara permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri dari Mask ROM, PROM, EPROM, EEPROM.
Block Diagram Mikrokontroler ATMega 328P pada Arduino UNO
Adapun block diagram mikrokontroler ATMega 328P dapat dilihat pada gambar berikut:




salah satu bagian stator motor DC-STP adalah berupa cakram inti besi melingkar yang diberi kumparan dan berfungsi sebagai pembangkit medan elektro-magnet ketika motor DC-STP diberi tegangan catu.
Syarat aliran arus listrik dapat mengalir pada sebuah kumparan listrik berinti besi sehingga menimbulkan medan elektro-magnet adalah adanya beda potensial pada kedua ujung kumparan listrik. Sehingga pada kumparan A (coil A) gambar 1 akan timbul medan elektro-magnet apabila kutub kumparan A diberi tegangan negatif (GND), karena pada kutub kumparan yang lainnya telah diberi tegangan positif (+Vcc).
Gambar 2. Kumparan listrik pada motor DC-STP 4-fasa
Prinsip kerja motor DC-STP adalah memutar rotornya yang berupa magnet batang bergigi lebih dari satu (dengan kutub magnet yang bervariasi) dengan bantuan medan elektro-magnet yang terbangkitkan oleh adanya aliran listrik pada kumparan listriknya.
Sebagai contoh, gambar 2 merupakan ilustrasi sebuah motor DC-STP yang memiliki 4-fasa atau 4-kumparan listrik. Untuk menjadikan rotor pada motor DC-STP berputar, maka pada kumparan listrik statornya harus diberi tegangan catu. Pada gambar 2 terlihat bahwa salah satu kutub kumparan (dari keempat kumparan listrik) digabungkan dan diberi catu tegangan positif (+Vcc). Tegangan catu pada gabungan salah satu kutub kumparan disbut juga dengan tegangan bersama (common voltage). Oleh sebab itu untuk membangkitkan medan elektro-magnet pada tiap-tiap kumparan listrik, maka pada kutub yang selainnya (yang tidak digabung) harus diberi tegangan negatif (GND). Namun pemberian tegangan catu negatif tersebut harus dilakukan secara bergantian dengan waktu tunda tertentu.
Misalnya, kumparan A diaktifkan (diberi tegangan negatif) selama 500 mili-second (waktu tunda), setelah durasi waktu tunda selesai maka kumparan A dinon-aktifkan (tidak diberi tegangan catu atau diberi tegangan +Vcc juga) dan kumparan B yang gantian diaktifkan dengan waktu tunda yang sama, yaitu 500 mili-second. Demikian seterusnya sampai kumparan D diaktifkan. Apabila kumparan D telah diaktifkan dan waktu tundanya usai, proses aktivasi kumparan tersebut diulang kembali dari awal, yaitu dimulai kembali dari aktivasi kumparan A. Pada setiap aktivasi kumparan listrik akan menimbulkan medan elektro-magnet, dimana kumparan yang teraktivasi akan menjadi magnet tidak tetap dengan kutub magnet tertentu, yaitu berkutub magnet utara (U) atau berkutub magnet selatan (S) tergantung dengan arah putaran lilitan kumparan kawatnya. Aktivasi kumparan A-B-C-D-A secara bergantian akan menjadikan bagian rotor motor DC-STP (yang juga merupakan magnet tetap dengan kutub yang bervariasi) berputar sebesar 360 derajat (1-putaran). Gerak putar rotor motor DC-STP terjadi karena munculnya sifat magnet antara rotor dan statornya, yaitu pertemuan kutub-kutub magnet senama akan tolak-menolak dan sebaliknya pertemuan kutub-kutub magnet tak-senama akan tarik-menarik.
Gambar 3. Driver motor DC-STP menggunakan IC ULN2003A
Gambar 3 merupakan skematik driver motor DC-STP yang menggunakan IC ULN2003A. Di dalam IC ULN2003A terdapat 7 buah rangkaian transistor darlington yang membentuk logika kerja seperti gerbang logika NOT (inverter/pembalik kondisi). Sehingga dalam penggunaannya akan lebih mudah mengingat bahwa IC ULN2003A itu berisi gerbang NOT dari pada mengingat bahwa IC ULN2003A itu berisi rangkaian transistor darlington. Untuk lebih memahaminya, mari melihat gambar konfigurasi pin IC ULN2003A pada gambar 4 berikut.
Gambar 4. Konfigurasi pin/kaki IC ULN2003A
Dengan melihat gambar 4, dapat diketahui bahwa dengan memberikan logika low (tegangan 0 volt) pada kaki In1 maka akan menghasilkan kondisi keluaran (output) pada kaki Out1 berlogika high (tegangan ±5 volt). Demikian juga sebaliknya, dengan memberikan logika high (tegangan ±5 volt) pada kaki In1 maka akan menghasilkan kondisi keluaran (output) pada kaki Out1 berlogika low (tegangan 0 volt).
Berikut ini adalah tabel aktivasi input IC ULN2003A driver motor DC-STP untuk mode 1 langkah dan mode ½ langkah. Tabel ini disesuaikan dari artikel terdahulu yang berjudul “Motor DC Stepper (DC-STP)”.
Tabel 2. Mode pemberian tegangan catu motor DC-STP (mode ½ langkah)
Pada gambar 3, kondisi logika kaki output yang terhubung dengan kutub kumparan listrik motor DC-STP dapat diatur dengan menggunakan kaki-kaki mikrokontroler AVR ATMEGA8/48/168/328 (Pin PC0, PC1, PC2, dan PC3) yang terhubung dengan kaki input IC ULN2003A, yaitu pada kaki In1, In2, In3, dan In4. Program mikrokontroler yang dibuat harus mengatur aktivasi kumparan listrik pada motor DC-STP secara bergantian dengan waktu tunda yang tepat untuk menghasilkan putaran pada rotornya. Pengaturan aktivasi kumparan listrik tersebut dapat dilakukan dengan mengikuti tabel 1 untuk mode 1 langkah dan tabel 2 untuk mode ½ langkah.
Read more at: https://elektronika-dasar.web.id/jk-flip-flop/
Copyright © Elektronika DasarJK flip-flop merupakan flip flopyang dibangun berdasarkan pengembangan dari RS flip-flop. JK flip-flop sering diaplikasikan sebagai komponen dasar suatu counter atau pencacah naik (up counter) ataupun pencacah turun (down counter). JK flip flop dalam penyebutanya di dunia digital sering di tulis dengan simbol JK -FF. Dalam artikel yang sedikit ini akan diuraikan cara membangun sebuah JK flip-flop
Read more at: https://elektronika-dasar.web.id/jk-flip-flop/
Copyright © Elektronika Dasar
Read more at: https://elektronika-dasar.web.id/jk-flip-flop/
Copyright © Elektronika Dasar
Read more at: https://elektronika-dasar.web.id/jk-flip-flop/
Copyright © Elektronika Dasar
Read more at: https://elektronika-dasar.web.id/jk-flip-flop/
Copyright © Elektronika Dasar
Read more at: https://elektronika-dasar.web.id/jk-flip-flop/
Copyright © Elektronika Dasar
5. Percobaan [Kembali]
1. Siapkan semua alat dan bahan yang diperlukan
2. Disarankan agar membaca datasheet setiap komponen
3. Cari komponen yang diperlukan di library proteus
4. Rangkailah Rangkaian sesuai dengan gambar dibawah
5. jika ingin mensimulasikan jangan lupa masukkan libarary arduiono
6. Coba dijalankan rangkaian apabila ouput LCD (hidup) maka rangkaian bisa digunakan











- video teori arduino
- Touch Sensor
g. Download File[Kembali]




Tidak ada komentar:
Posting Komentar